News Sixents Forms A Strategic Partnership With U-Blox To Upgrade Their High Precision Positioning Service September 24, 2020
Research paper Adversarial Concurrent Training: Optimizing Robustness and Accuracy Trade-off of Deep Neural Networks July 30, 2020
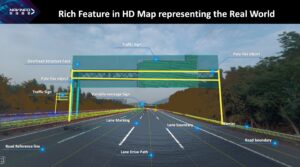
Research paper Crowdsourced 3D Mapping: A Combined Multi-View Geometry and Self-Supervised Learning Approach July 25, 2020
Research paper Monocular Vision Based Crowdsourced 3D Traffic Sign Positioning With Unknown Camera Intrinsics and Distortion Coefficients July 12, 2020
News Grade A Surveying And Mapping Qualification Of Navigation Map Production Obtained By NavInfo Subsidiary June 9, 2020
Research paper Improving Generalization And Robustness With Noisy Collaboration In Knowledge Distillation October 12, 2019